
Главной задачей робота-гида является проведение экскурсий на выставках и музеях. Робот-гид должен предоставлять мультимедийную информацию об экспонатах, а так же свободно перемещаться между ними по заранее запланированному или сформированному посетителями маршруту. Естественно при передвижении робот не должен сталкиваться ни с людьми, ни с какими-либо препятствиями для его движения. Для этого […]
Author Archives : admin
Мы разрабатываем электронику для своих роботов. Мы создаем электронные модули, каждый из которых решает конкретную задачу и может применяться в разных проектах. Основные требования к нашим модулям: низкая цена, легкодоступные компоненты, простота использования.
Разаработка функциональных узлов роботов
Целью работы является разработка интеллектуальных алгоритмов двумерной навигации автономного мобильного робота в неизвестном пространстве с динамической внешней средой, обеспечивающих робастное движение робота и адаптацию к внешней среде, а также создание реальных образцов мобильных роботов для проведения экспериментальных исследований.
Двумерная навигация автономного мобильного робота в неизвестной среде
Поздравляем победителей Первого Национального чемпионата WorldSkills Bealrus 2014 в компетенции «Мобильная робототехника» С 21 мая по 22 мая 2014 года в Минске прошел Первый Национальный чемпионат WorldSkills Bealrus 2014. В конкурсных номинациях приняли участие обучающиеся, получающие профессионально-техническое, среднее специальное, высшее образование, молодые рабочие (служащие) и специалисты. В номинации «Мобильная робототехника» […]
Чемпионы WorldSkills 2014
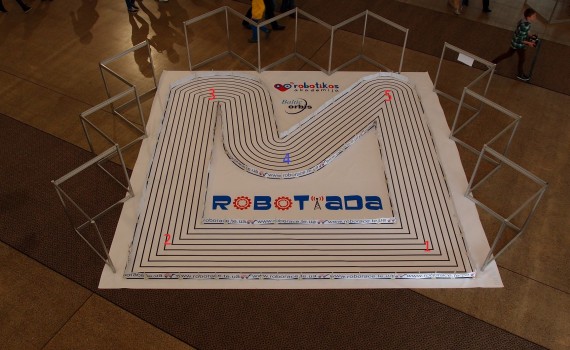
трасса не оченть большая нужно быть осторожным с показаниями датчиков так как подьемы могут оцениваться роботом как стенки.
Трасса — Львов

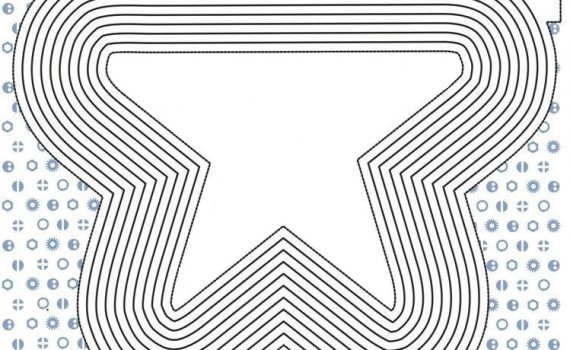
Лучшая трасса в роборейсе хоть и напоминает кое что. Есть длинная прямая шпилька и серия поворотов.
Трасса — Черновцы

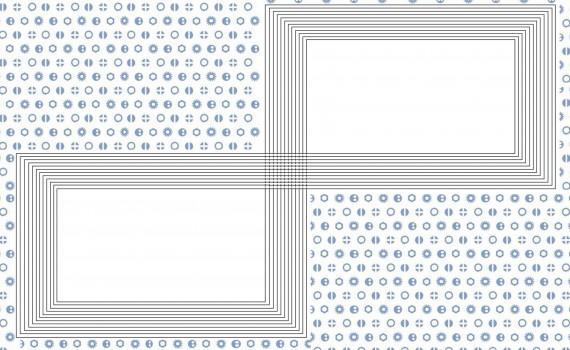
Эта трасса феерический писец её творцов! Я понимаю желание вписать 2 буквы У но уж лучше напечатать её побольше и сделать нормальный логотип! Жалко бедных роботов попадающих в тупики.
Трасса — Киев
Все повороты очень похожи. Достаточно медленна трасса.
Трасса — Брест

Нет описания
Трасса — Ивано-Франковск
На трассе пять поворотов. Первый и второй не сложные для роботов. Третий требует от робота высокой поворачиваемости. Четвертый не сложный так как скорость не высока после шпиьки. Пятый поворот очень широкий иногда датчики не видят внешннюю стенку и робот может уткнуться в угол.