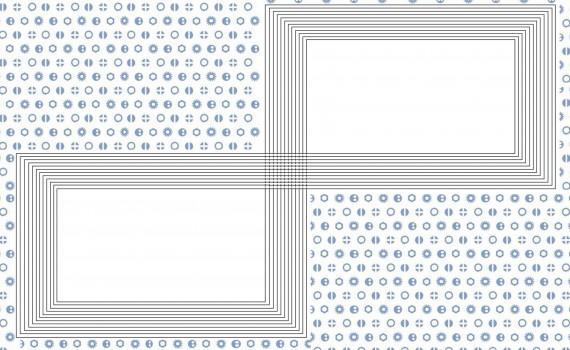
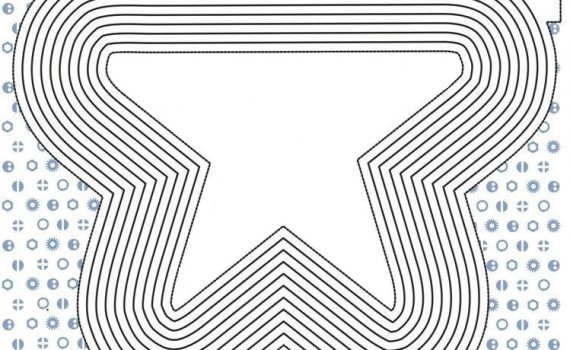
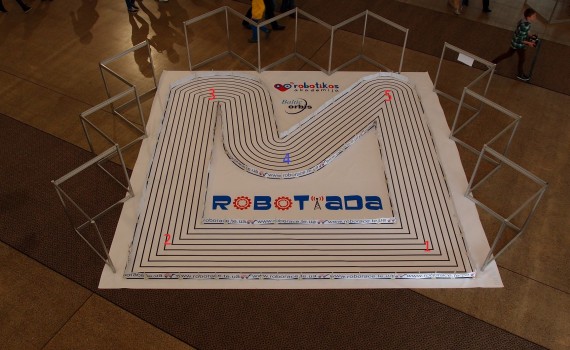
На трассе пять поворотов. Первый и второй не сложные для роботов. Третий требует от робота высокой поворачиваемости. Четвертый не сложный так как скорость не высока после шпиьки. Пятый поворот очень широкий иногда датчики не видят внешннюю стенку и робот может уткнуться в угол.